Memory
Kernel address space
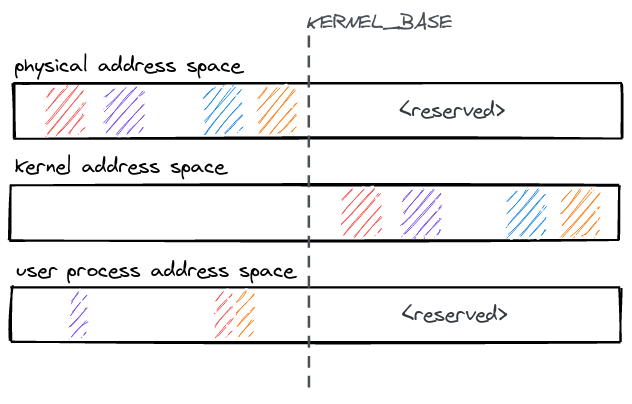
The kernel address space layout follows a simple scheme: All physical memory is
identity mapped with a constant offset KERNEL_BASE in the kernel address
space. Therefore, any physical address can be accessed in the kernel by adding
KERNEL_BASE to it.
All physical memory is always accessible in the kernel and does not need to
mapped/unmapped at runtime. The kernel binary is linked as position independent
code, it is loaded into physical memory and then relocated to run at the kernel
virtual address (KERNEL_BASE + physical address).
Physical memory
Physical memory allocation and dynamic memory allocation for kernel data structures are two basic subsystems that do not rely on NR. Replicated subsystems often require physical frames, but that allocation operation itself should not be replicated. For example, when installing a mapping in a page table, each page table entry should refer to the same physical page frame on all replicas (though, each replica should have its own page tables). If allocator state were replicated, each allocation operation would be repeated on each replica, breaking this.
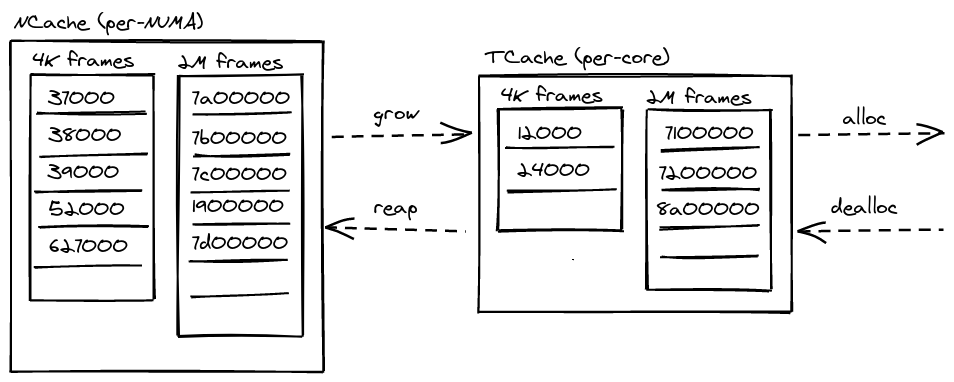
At boot time, the affinity for memory regions is identified, and memory is divided into per-NUMA node caches (FrameCacheLarge). The FrameCacheLarge statically partitions memory further into two classes of 4 KiB and 2 MiB frames. Every core has a local FrameCacheSmall of 4 KiB and 2 MiB frames for fast, no-contention allocation when it contains the requested frame size. If it is empty, it refills from its local FrameCacheLarge. Similar to slab allocators, NRK' FrameCacheSmall and FrameCacheLarge implement a cache frontend and backend that controls the flow between TCaches and NCaches.
Dynamic memory
Since NRK is implemented in Rust, memory management is greatly simplified by relying on the compiler to track the lifetime of allocated objects. This eliminates a large class of bugs (use-after-free, uninitialized memory etc.), but the kernel still has to explicitly deal with running out of memory. NRK uses fallible allocations and intrusive data structures to handle out-of-memory errors gracefully.
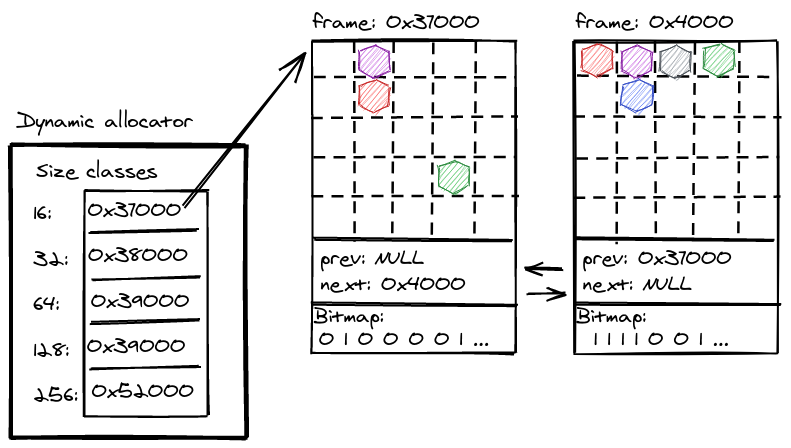
The dynamic memory allocator in nrk provides an implementation for the Rust global allocator interface. It uses size classes and different allocators per class (e.g., it's a segregated-storage allocator), while incorporating some of the simple and effective ideas from slab allocation: For each size class, 2MiB or 4 KiB frames are used which are sliced into equal sized objects of a given class. A bitfield at the end of every frame tracks the meta-data for objects within the frame (e.g., to determine if its allocated or not).
Deterministic memory
The kernel has to explicitly handle running out of memory. nrk uses fallible allocations to handle out-of-memory errors gracefully by returning an error to applications. We do this in almost all cases in the kernel (with some exceptions during initializations etc.) but some of the 3rd party dependencies (e.g., to parse ELF binaries) are not completely converted to fallible allocations yet.
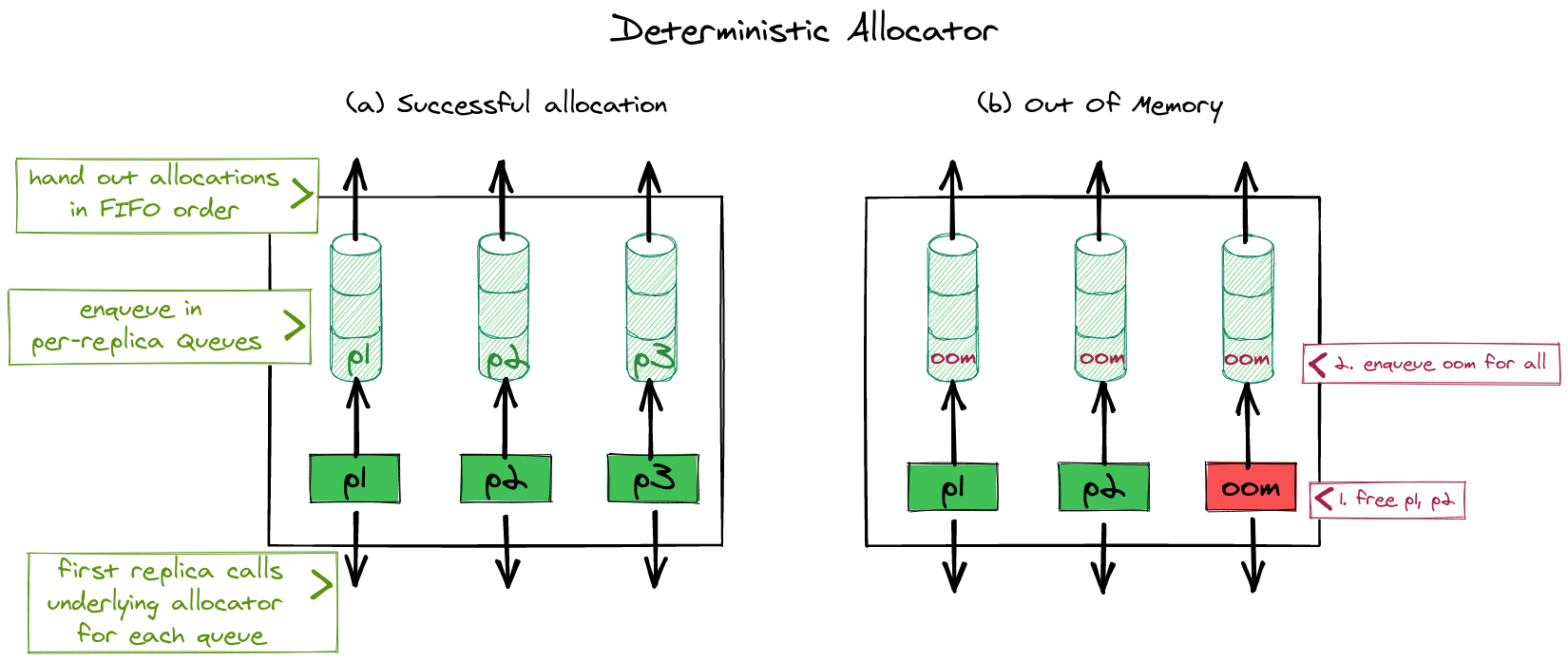
Another issue is that handling out-of-memory errors in presence of replicated data-structures becomes a little more challenging: Allocations which happen to store replicated state must be deterministic (e.g. they should either succeed on all replicas or none). Otherwise, the replicas would end up in an inconsistent state if after executing an operation, some replicas had successful and some had unsuccesful allocations. Making sure that all replicas always have equal amounts of memory available is infeasible because every replica replicates at different times and meanwhile allocations can happen on other cores for unrelated reasons. We solve this problem in nrk by requiring that all memory allocations for state within NR or CNR must go through a deterministic allocator. In the deterministic allocator, the first replica that reaches an allocation request allocates memory on behalf of all other replicas too. The deterministic allocator remembers the results temporarily, until they are picked up by the other replicas which are running behind. If an allocation for any of the replica fails, the leading replica will enqueue the error for all replicas, to ensure that all replicas always see the same result. Allocators in nrk are chainable and it is sufficient for the deterministic allocator to be anywhere in the chain so it doesn't necessarily have to be invoked for every fine-grained allocation request. Our implementation leverages custom allocators in Rust, which lets us override which heap allocator is used for individual data-structures.